
|
|

:针对滚刺机的启动要求时间短、惯性大,同时电机快速启动易产生较大超调量的问题,对控制管理系统的结构可以进行了分析,并详细分析了交流异步电动机的转动特性,根据引入积分环节对滚刺机控制管理系统的影响,设计了变速积分PID控制器,通过和传统电机启动方法和与加入普通PID的电机启动相比较,仿真出驱动电机转速与时间的响应曲线,证明了变速积分PID在快速性和稳定能力上都明显优于传统PID控制器,能够在3s内稳定地达到设定的最高速度。
摘要:针对滚刺机的启动要求时间短、惯性大,同时电机快速启动易产生较大超调量的问题,对控制管理系统的结构可以进行了分析,并详细分析了交流异步电动机的转动特性,根据引入积分环节对滚刺机控制管理系统的影响,设计了变速积分PID控制器,通过和传统电机启动方法和与加入普通PID的电机启动相比较,仿真出驱动电机转速与时间的响应曲线,证明了变速积分PID在快速性和稳定能力上都明显优于传统PID控制器,能够在3s内稳定地达到设定的最高速度。
滚刺机用于钢厂连铸生产线系统中,对滚刺电机的快速启动控制能否有效是去除毛刺的关键,滚刺机辊重很大,要求在3s的时间内达到设定的最高速度。因此,滚刺电机的启动应满足快速性、高精度、高自动化的要求。目前,滚刺电机仍采用传统的自然启动方法和加入普通PID (Proportion Integration Differentiation)进行启动控制。传统的启动方法时间相对来说比较长,普通的PID控制器难于协调快速性和稳定能力之间的矛盾,在相当多的情况下,两者都不能取得令人满意的效果。近年来,电机快速启动的设计吸收新的控制思想,利用计算机的优势形成了模糊PID、自适应PID、神经网络PID、积分分离PID等多种控制器,取得了较为满意的效果。针对滚刺机惯性大的特点,将变速积分PID引入到鞍钢3号连铸机的滚刺机控制管理系统中,并进行了现场测试,根据结果得出,变速积分PID能够克服滚刺机在快速启动时易产生较大超调量的问题。并用MATLAB对算法进行了仿线 控制管理系统结构及性能要求
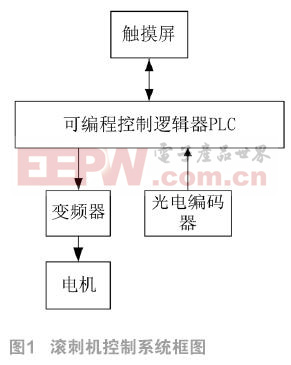
滚刺机启动控制管理系统主要由触摸屏、可编程逻辑控制器(Programmable Logic Controller, PLC)(S7-300型)和监测装置三大部分所组成。系统组成框图如图1所示。
可编程逻辑控制器是整个控制管理系统的核心控制单元,PLC 直接与现场各类设备相连接,对所连接的设备实施监测与控制,它一方面接收光电编码器传来的检测信号,另一方面将寄存器中的数据上传至触摸屏,触摸屏显示PLC提供的数据信息,并向PLC发送指令控制程序运行,完成控制功能。其中,变频器与PLC采用USS (United States Standard)协议对电机的运作时的状态来控制和监视。图1中要求电动机能在3s内由静止快速达到700n/min方可达到要求。
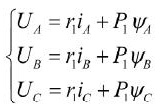
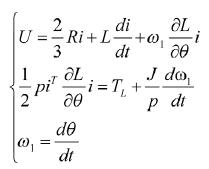
和Uc为电机的定子电压,ia、ib和ic为电机的定子电流,ψa、ψb和ψc为电机的定子绕组磁链,r1为电机的定子绕组电阻,p1为对时间的微分算子。2) 转子电压方程为:(2)
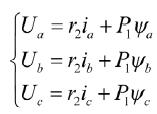
和Uc为电机的转子电压,ia、ib和ic为电机的转子电流,ψa、ψb和ψc为电机的转子绕组磁链,r2为电机的转子绕组,p1为电阻对时间的微分算子。3)异步机的磁链方程为:(3)
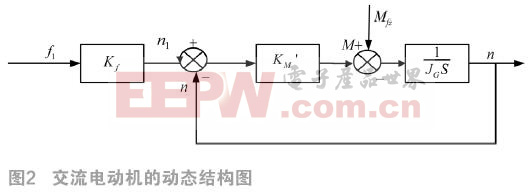
5) 汇总定、转子电压方程和磁链方程,再加上电机的运动方程,我们大家可以得到基本微分方程表示的交流电机数学模型 如下:
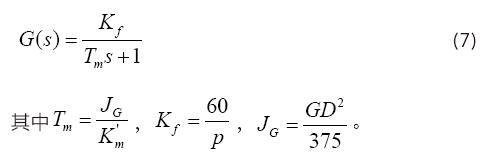
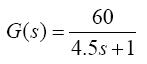
负载在电机轴上的有效转动惯量与减速比的平方成反比,即故负载可以忽略不计,只对电机进行数学建模。根据电机所选型号及主要参数可得电机的传递函数:
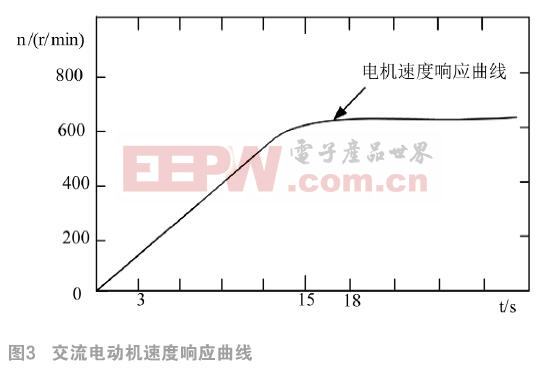
根据图3速度响应曲线能够获得传统的电机自然启动速度平稳,操纵控制方便,维护简单,但系统存在着静差,同时启动时间太长。
![]()
根据图3速度响应曲线能得出电机的自然启动不能满足电机快速启动的要求,在控制管理系统中最常用的算法是PID 控制。常规的PID 控制管理系统由PID 控制器和被控对象组成,其控制管理系统原理如图4所示,控制规律为:
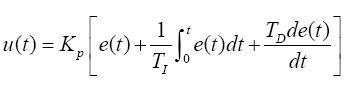
。普通的PID控制器引入积分环节的目的是消除静态误差,提高控制精度。但是在启动和开始阶段,系统的设定值和检测值有几率存在较大的偏差,这样一个时间段有积分作用会造成PID运算中积分的积累,使得控制量超过执行机构可能的最大动作范围,会引起较大的超调,甚至引起系统的震荡。因此,考虑使用变速积分PID,根据偏差的变化,调整加入的积分作用,既能减少超调量,又能使控制性能得到较大的改善。
![]()
![]()
本文来源于中国科技期刊《电子科技类产品世界》2016年第9期第61页,欢迎您写论文时引用,并标注明确出处。


